











- Kairos-HomeWorld is goal constructed for embodied intelligence and represents the primary unified framework able to producing an entire, totally interactive residence surroundings from a single textual content immediate. Extending indoor scene technology past particular person rooms, it permits whole-home simulation through which each object is totally manipulable inside an built-in simulation engine.
- Kairos-HomeWorld employs a four-stage hierarchical structure encompassing floorplan technology, 2D-to-3D lifting, recursive refinement, and manipulable object placement. This method permits the manufacturing of worldwide coherent, bodily correct, and simulation-ready scenes. Every surroundings incorporates greater than 15 manipulable objects and achieves a Footprint Object Density of 4.16, the very best amongst in contrast strategies.
- The accompanying open-source dataset is purpose-built for Chinese language households, pairing 300,000 actual residential ground plans with 5,000 totally furnished, simulation-ready properties and 50,000 physics-enabled interactive object property. Already deployed in ACE ROBOTICS’ day by day robotic coaching, it considerably accelerates the simulation-to-reality switch cycle.
SHANGHAI, CHINA – Media OutReach Newswire – 5 June 2026 – ACE ROBOTICS, in collaboration with the Multimedia Laboratory at The Chinese language College of Hong Kong (CUHK) and Shenzhen Loop Space Institute, immediately introduced the open-source launch of Kairos-HomeWorld, the business’s first unified World Mannequin framework able to producing full home-scale, object-level interactive 3D environments from a single textual content immediate. The answer addresses longstanding limitations in indoor scene technology, which has usually been restricted to single-room outputs with weak world consistency and restricted interactivity. Kairos-HomeWorld overcomes these constraints by delivering structurally coherent, bodily believable, and functionally full residential environments. These high-fidelity, large-scale simulations present a sturdy basis for advancing embodied intelligence functions and accelerating real-world robotic coaching.
The long-term imaginative and prescient for embodied intelligence is the house surroundings. Nevertheless, residential settings are inherently numerous and extremely customized, requiring robots to be educated throughout a broad vary of practical and differentiated situations earlier than they will reliably function in even a single family. Excessive-fidelity simulation affords essentially the most sensible pathway to attaining this at scale, but present approaches usually contain a trade-off: artificial environments lack realism, whereas scanned real-world scenes supply restricted interactivity. Kairos-HomeWorld, along with its accompanying dataset, is designed to bridge this hole, delivering each practical and interactive environments inside a unified framework.
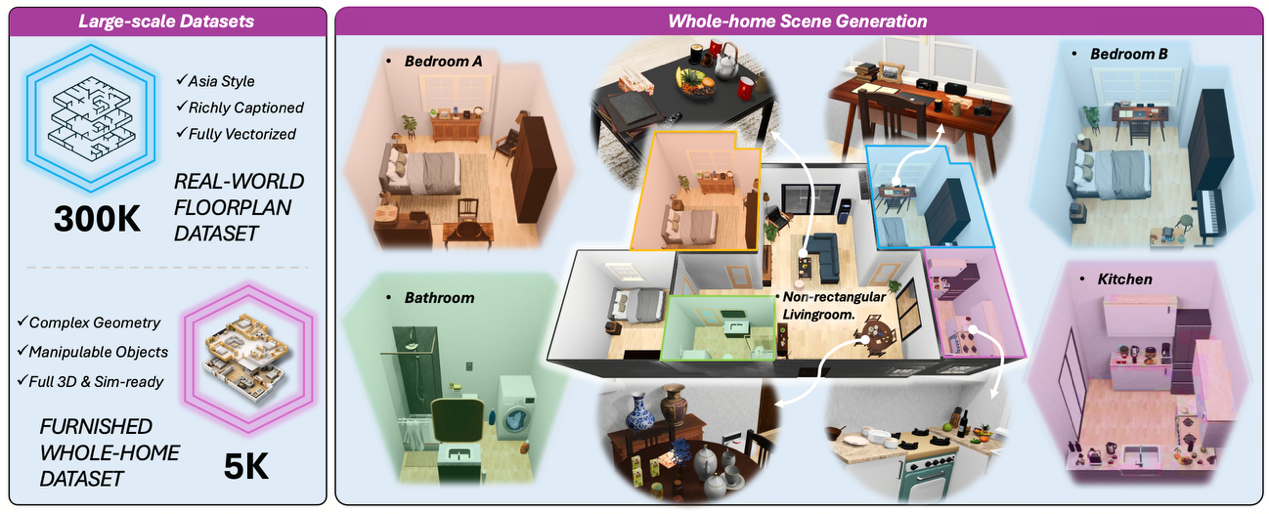
A four-stage structure for whole-home, object-level technology
Standard approaches to indoor scene technology stay constrained to single-room outputs, typically exhibiting weak world consistency, frequent bodily inaccuracies, and restricted or no interactivity. Kairos-HomeWorld takes a basically completely different method. It decomposes whole-home technology right into a structured, four-stage course of, redefining the underlying architectural paradigm from the bottom up.
Stage 1 — Ground Plan Era. A Ok-D tree-based method interprets real-world ground plans right into a hierarchical textual content illustration that may be effectively processed by giant language fashions (LLMs). This methodology mitigates widespread points in typical format technology, together with room overlaps and fragmented topologies, leading to extra coherent and structurally constant spatial configurations.
Stage 2 — 2D-to-3D Lifting & Furnishings Format Era. A “top-down world initialization mixed with a first-person element walkthrough” method anchors the method to the 3D constructing shell generated in Stage 1. This technique mitigates the geometric drift generally related to typical 2D-to-3D lifting strategies, enabling extra steady and spatially constant scene technology.
Stage 3 — Recursive Refinement. A fine-tuned vision-language mannequin performs iterative validation and correction, routinely figuring out and resolving bodily inconsistencies, similar to obstructed doorways or object collisions. This recursive course of materially reduces spatial errors, attaining among the many lowest reported furniture-collision charges within the business.
Stage 4 — Manipulable Object Placement. A surface-centric placement algorithm assigns every object detailed bodily properties, together with materials composition, density, friction, and structural assist relationships. Every generated scene incorporates a median of greater than 15 manipulable objects and achieves a Footprint Object Density (FOD) of 4.16, a metric reflecting the focus of things throughout furnishings surfaces. All objects are natively appropriate with simulation engines, enabling direct interplay for duties similar to greedy, motion, and stacking.
The ensuing environments transfer past “viewable however not actionable” outputs. Their coherent spatial construction permits seamless, steady navigation throughout a number of rooms, whereas objects embedded with practical bodily properties enable robots to simulate complicated family duties end-to-end. Taken collectively, this method addresses key limitations in present knowledge pipelines, resolving the shortage of high-quality 3D simulation knowledge, the dearth of realism in artificial environments, and the restricted interactivity of scanned scenes inside a single unified framework.
The dataset: 300,000 actual ground plans, 5,000 totally interactive properties, constructed for Chinese language households
ACE ROBOTICS and CUHK are open-sourcing a dataset of 300,000 structurally annotated residential ground plans, sourced from real-world listings and processed by a multi-stage automated pipeline. The pipeline vectorizes and labels key spatial parts, together with door and window positions, room geometry, useful zoning, and connectivity. By comparability, extensively used benchmarks similar to RPLAN and ResPlan comprise roughly 80,000 and 17,000 ground plans, respectively, underscoring the dimensions and comprehensiveness of the Kairos-HomeWorld dataset.
Constructing on this basis, the dataset additionally contains 5,000 totally furnished residential environments, every that includes an entire furnishings format and a median of greater than 15 physics-enabled, manipulable objects, powered by the PhysX-Omni mannequin. All property are sim-ready and could be immediately imported right into a simulation engine, enabling quick use in interactive coaching situations.
Most present open indoor-scene datasets are centered on North American and European residential codecs, usually that includes open-plan kitchens, the absence of service balconies, and layouts and design parts that seize solely a slim phase of world housing. Consequently, robots educated on these datasets typically exhibit restricted transferability when deployed in environments outdoors their scope. Kairos-HomeWorld ‘s dataset is purpose-built for Chinese language households, with deliberate protection of traditionally under-represented housing typologies. It spans a variety of unit sizes, from roughly 30 m² (round 320 sq ft) studio flats to residences exceeding 200 m² (roughly 2,150 sq ft). The dataset precisely displays key architectural options widespread in these settings, together with north-south cross-ventilated layouts, enclosed kitchens, devoted service balconies, wet-and-dry-separated bogs, and entryway storage, in addition to the irregular room configurations typically present in older housing inventory.
The dataset is being brazenly launched to each educational and business communities. Going ahead, the staff plans to increase its scope to incorporate further areas, inside types, and interplay situations, additional reducing obstacles to real-world-ready coaching for embodied intelligence.
See it in motion: one immediate to a totally interactive residence
Kairos-HomeWorld runs the complete end-to-end pipeline, from preliminary textual content enter to a totally interactive residence surroundings, delivering world spatial consistency, bodily realism, and seamless interactivity from a single immediate.
The system begins with a single-line immediate: “Generate a 90 m² (roughly 970 sq ft) two-bedroom house in neo-Chinese language fashion.” Leveraging actual ground plan knowledge and its Ok-D tree illustration, Kairos-HomeWorld first constructs an empty spatial format aligned with real-world dwelling patterns, incorporating cross-ventilation and well-defined useful zoning. Constructing on this basis, a hierarchical “world format plus first-person element” method furnishes the surroundings with stylistic coherence, whereas a PhysX-Omni rendering cross assigns full bodily properties to all surfaces and objects, together with articulated habits, making certain the scene is totally interactive and sim-ready.
A single natural-language instruction, “tidy the entire residence”, is decomposed by the robotic into a wide range of discrete sub-tasks, executed sequentially alongside an entire navigation path spanning the lounge, bedrooms, kitchen, rest room, and eating space. The robotic acknowledges objects, plans environment friendly routes, and performs exact manipulation duties, together with articulated-object interactions for opening fridge and cupboard doorways, fluid interactions for pouring laundry detergent, soft-body interactions for drawing curtains, irregular-object interactions for greedy apples, and gravity-based bodily interactions for putting snacks.
Standard simulation environments usually assist navigation-focused coaching in isolation. In contrast, Kairos-HomeWorld integrates globally constant spatial buildings with objects that embody practical bodily properties. This allows robots to work together naturally with greater than 15 object varieties, precisely modeling real-world dynamics similar to collision, gravity, and friction, and to rehearse the complete lifecycle of complicated family duties totally inside a digital surroundings.
Throughout the business, the identical structural bottleneck, the shortage of home-scale coaching knowledge, is being addressed by a number of approaches. For instance, Determine AI’s collaboration with Brookfield focuses on amassing human exercise knowledge throughout greater than 100,000 residential models. Kairos-HomeWorld addresses this problem by on-demand artificial technology, delivering scalable coaching environments enhanced with object-level bodily realism, capabilities that real-world knowledge seize alone can not totally present.
In distinction, Kairos-HomeWorld delivers considerably decrease prices and better effectivity for family robotic coaching. Powered by its world mannequin, it may well programmatically generate numerous Chinese language residence simulation scenes and physics-enabled interactive objects at scale.
Robots can full a full vary of family duties coaching totally inside the digital surroundings. New scene technology incurs near-zero marginal price, eliminating substantial real-world testing bills similar to web site operation and upkeep and furnishings harm. In the meantime, unconstrained by the restricted inventory of bodily residential properties, it outperforms real-world knowledge assortment approaches in each coaching effectivity and scalable enlargement.
Kairos-HomeWorld is already deployed in ACE ROBOTICS’ embodied intelligence coaching workflows, enabling full-pipeline simulation of long-horizon family duties, together with cross-room navigation and multi-room tidying. By permitting robots to rehearse full activity sequences in a digital surroundings, the platform considerably shortens the simulation-to-reality switch cycle. This method lowers obstacles to creating embodied intelligence programs and helps the accelerated, large-scale deployment of residence robotics, significantly inside the Chinese language market. Kairos-HomeWorld is now accessible on GitHub.Hashtag: #ACEROBOTICS
The issuer is solely answerable for the content material of this announcement.
About ACE ROBOTICS
Equipping robots with clever “brains” and interesting “souls”.
ACE ROBOTICS is a pioneering robotics firm devoted to advancing the sector of embodied intelligence. Via breakthrough technological improvements and deep insights into embodied intelligence situations, we intention to empower robots with the flexibility to autonomously perceive and discover the bodily world, thereby accelerating their industrial implementation.
The corporate pioneered the ACE R&D paradigm and constructed a vision-based “environmental knowledge engine, real-world cognition, embodied interplay generalization” know-how chain. Utilizing full spatiotemporal and multi-perspective environmental seize as its engine, together with Kairos 3.0 – China’s first open-source and commercially relevant world mannequin – plus the Embodied Basis Mannequin as its technical spine, ACE ROBOTICS addresses core business challenges similar to knowledge shortage, widespread sense gaps, poor generalization, and restricted versatility. Concurrently, the corporate unveiled its flagship A1 Embodied Tremendous Mind Module, accelerating the large-scale industrial deployment of embodied intelligence throughout numerous situations.
ACE ROBOTICS is each a know-how pioneer and an ecosystem builder. Via strategic cooperation with prime {hardware} producers, cloud service suppliers, and vertical state of affairs companions, now we have damaged by the “model-hardware-scenario” industrial impasse, offering standardized and customised options which are driving the event of China’s embodied intelligence business.
![]()





{kind=link}